
En el proceso de producción, la válvula de control es punto principal del sistema de control. Una vez que falla, afectará directamente el funcionamiento seguro del dispositivo y tendrá un impacto significativo en el proceso de producción. El uso del posicionador de válvula de control inteligente puede mejorar las características de flujo y el rendimiento de las válvulas de control. A través de la información digital, la comunicación con el equipo DCS o BUS puede mejorar la capacidad de control de producción de la empresa y garantizar la producción segura y estable del dispositivo.

Desventajas
1. Posicionadores convencionales
1) Los posicionadores convencionales son principalmente un principio de equilibrio de la fuerza mecánica, adoptan un mecanismo deflector de boquilla, más partes móviles, fáciles de verse afectados por fluctuaciones de temperatura, vibraciones externas y pueden cambiar otras interferencias, mala resistencia ambiental; coeficiente de resorte elástico, causará la no linealidad de la válvula de control, lo que resultará en una reducción de la calidad; la vibración externa para forzar el mecanismo de equilibrio, fácil de causar el desgaste de los componentes y la desviación del cero y de la carrera, también hace que el posicionador sea un desafío para el trabajo.

2) Debido a las características de la boquilla, el actuador también consume una gran cantidad de aire comprimido en un estado estable. Si el número de actuadores es mayor, el consumo de energía es más grande y la boquilla en sí es una fuente potencial de fallos, que se bloquea fácilmente con el polvo o partículas de suciedad. El posicionador no funciona correctamente.
3) Es imposible utilizar un equipo especial sin aislar el lazo de control cuando el localizador convencional se ajusta manualmente y el ajuste de los puntos cero y la carrera se afectan entre sí. Debe configurarse repetidamente, requiere mucho tiempo y es laborioso. Es más difícil cambiar cuando no está alineado y la desconfiguración es pronunciada.
2. Composición y principio del posicionador de válvula inteligente
2.1 Composición de posicionadores inteligentes / inteligentes
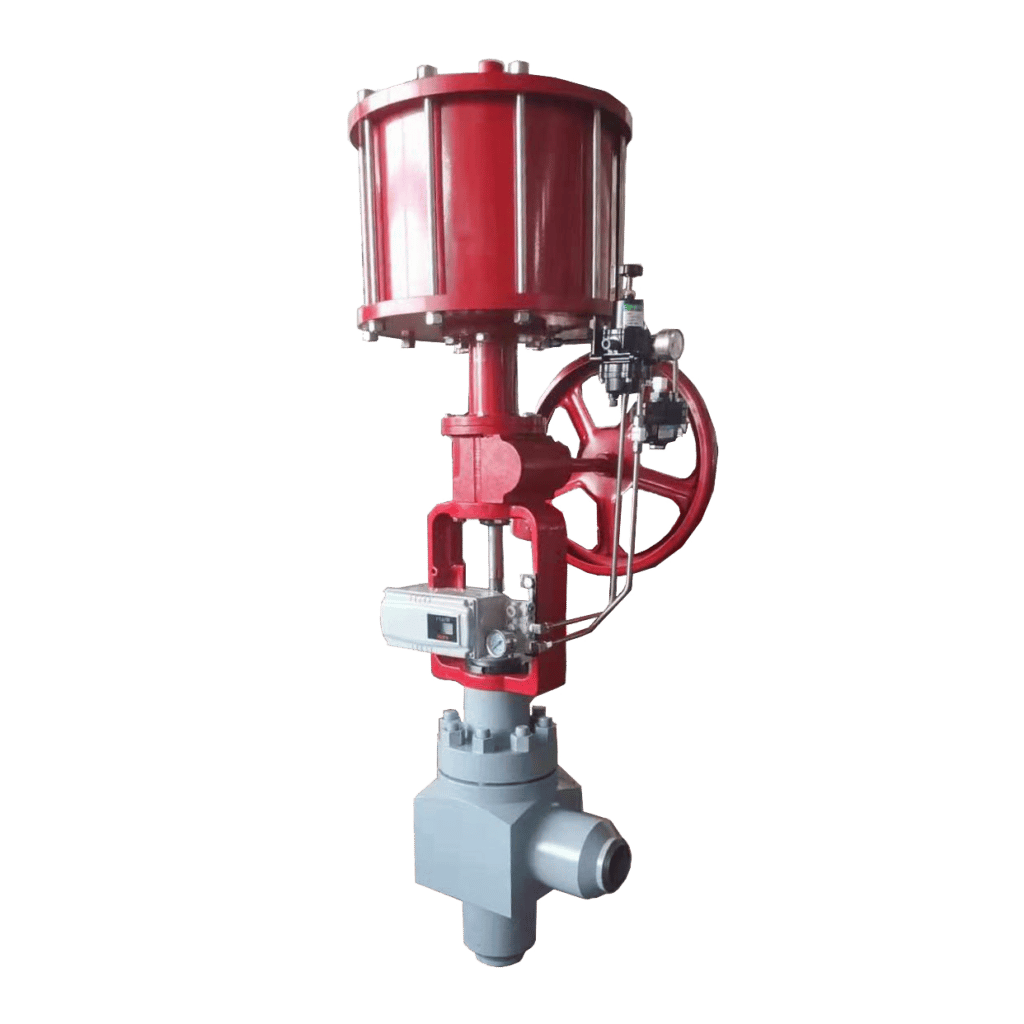
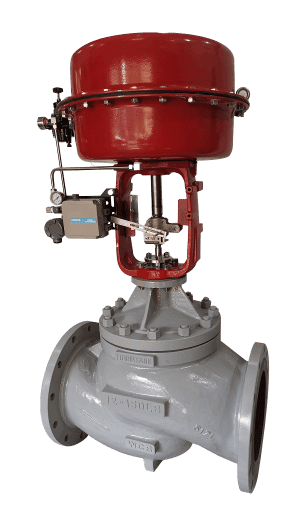
El posicionador de válvula inteligente es una especie de posicionador de válvula con protocolo de comunicación HART. Consta de tres partes: módulo controlado electrónicamente por microprocesador, incluido el módulo de comunicación HART y el interruptor de interfaz de usuario local, una válvula piezoeléctrica del módulo convertidor eléctrico / neumático y un sensor de posición de la válvula.
2.2 Principio de funcionamiento del posicionador inteligente

Dos líneas, señales de 4 ~ 20 mA, controlan todo el bucle de control. El módulo HART envía y recibe información digital superpuesta en 4 ~ 20 señales para realizar una comunicación digital bidireccional con el microprocesador. La señal de 4 ~ 20 mA de cantidad analógica se transmite al microprocesador, que se compara con la retroalimentación del sensor de posición de la válvula. El microprocesador realiza el cálculo de control de acuerdo con el tamaño de la desviación y la dirección (el control de primer nivel), envía la instrucción de control electrónico a la válvula piezoeléctrica para que se abra y se cierre. La válvula piezoeléctrica corresponde al incremento de la presión de salida del amplificador neumático de acuerdo con el ancho del pulso de instrucción de control, y la salida del amplificador neumático se retroalimenta al bucle de control interno. La carrera de la válvula se controla mediante el cambio de presión de aire en el actuador. Cuando la desviación de control es significativa, la válvula piezoeléctrica envía una señal de pulso amplia, de modo que el posicionador emite una señal continua, que cambia en gran medida a la presión de señal del actuador para impulsar la válvula rápidamente. Cuando la válvula alcanza la posición requerida (entrando en la zona muerta), la válvula piezoeléctrica no tiene salida de pulso y la salida del posicionador permanece en cero, lo que hace que la válvula sea estable en una posición determinada.
3. Ajuste del posicionador inteligente
A través del interruptor de configuración de la interfaz de usuario local, puede completar la ganancia del posicionador, la acción positiva y negativa, las características del posicionador y si se permite el ajuste automático y otras configuraciones básicas; sin agregar herramientas, puede calibrar automática o manualmente el posicionador; ya través del botón de control manual de la interfaz de usuario local, la válvula de control manual.
4. Otras características de los posicionadores de válvulas inteligentes
1) a través de una variedad de combinaciones para indicar el estado operativo o las condiciones de advertencia, con funciones de diagnóstico y monitoreo.
2) el consumo de gas es muy pequeño, en el estado estable de 0.6 MPa, solo 0.12 NM3 / h, menos del 8% del posicionador convencional, no sensible al cambio de presión de la fuente de gas.
3) el uso del mismo modelo se puede utilizar tanto para viajes rectos como angulares, mediante la selección del módulo de doble acción, se puede controlar el actuador de cilindro de pistón de doble acción.
4) comunicación bidireccional con localizadores que utilizan protocolos de comunicación HART.
5. Debe prestar atención en el uso práctico.
5.1 Mayores requisitos de capacidad de carga para regular señales
La impedancia de entrada del localizador inteligente es alta en el proceso de uso práctico. Cuando la señal de entrada es de 20 mA, el valor mínimo requerido de la tensión de alimentación es de 12 VCC y la capacidad de carga no es inferior a 600 Ω; de lo contrario, el localizador no funcionará correctamente.
5.2 Las zonas muertas operativas de los localizadores deben establecerse razonablemente
Cuanto más pequeña sea la zona muerta del posicionador, mayor será la precisión de posicionamiento, lo que provoca un malentendido de que cuanto más pequeña sea la zona muerta, mejor, pero esto hará que la válvula piezoeléctrica y la varilla de retroalimentación y otras partes móviles sean más frecuentes, a veces causan oscilación de la válvula. , afectando la vida útil del posicionador y la válvula, por lo que el ajuste de la zona muerta del posicionador no es fácil de ser demasiado pequeño; después de que se cambia la configuración del posicionador, se debe reajustar antes de que surta efecto.
5.3 Instalación del posicionador de válvulas
Un principio esencial de la instalación del posicionador es que el posicionador, el vástago y la varilla de retroalimentación deben formar una retroalimentación negativa de circuito cerrado.
Una vez instalado el posicionador, el vástago y la varilla de retroalimentación no están conectados y la varilla de retroalimentación se gira a mano. Si la dirección de acción del vástago es opuesta a la dirección de acción de la varilla de retroalimentación, se forma la retroalimentación negativa de circuito cerrado. La varilla de retroalimentación y el vástago están fijos para garantizar que el posicionador funcione en el mejor segmento lineal. La instalación del localizador no es correcta, también aumentará su desviación lineal.
5.4 Selección de las características de flujo del posicionador
Las características de flujo de las válvulas de control están determinadas por las características de procesamiento del núcleo de la válvula. Si los requisitos del proceso son consistentes con ellos, las características de salida del posicionador deben ser una salida lineal; en el uso práctico, si las características del núcleo de la válvula no se ajustan a los requisitos del proceso, la válvula con núcleo lineal se puede cambiar configurando las características de salida del posicionador.
5.5 Mantenimiento de posicionadores
Cuando el posicionador está dañado por diferentes módulos funcionales, si el localizador no se puede usar, es costoso reemplazar el localizador en su totalidad. Debido a que se cambian las válvulas de control (carrera, etc.) que utilizan el localizador, es posible que el ajuste automático no cumpla con los requisitos. De esta manera, la válvula de control se puede posicionar con precisión y con la velocidad de respuesta adecuada, cumpliendo así los requisitos del control del proceso.



